方案概述:
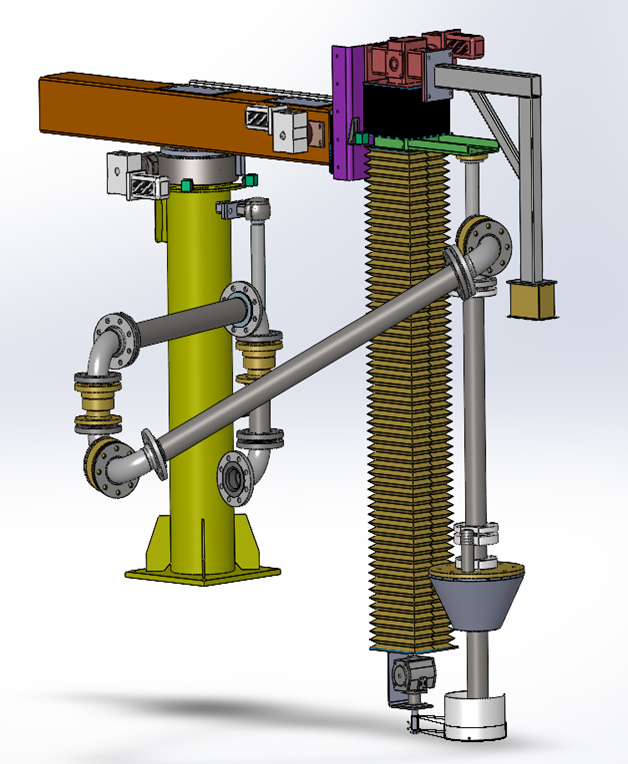
智能鶴管采用電動伺服驅動,定位方案為視覺識別。配件包含鶴管本體、操作控制箱、伺服電機、電機減速器、升降模組、水平模組、旋轉模組、鶴管限位檢測等功能控制系統采用西門子PLC主控,彩色顯示屏。系統集成定量模塊、電磁流量計、電動調節閥、鑰匙管理模塊、液位報警模塊、吹掃模塊、泵控制模塊等部分。基于視覺系統的定位算法主要是通過采集罐口特征信息,經過軟件深度學習,根據罐口特征自動識別罐口區域。此種算法比之前使用的模板匹配的方式更加可靠,通過以圖找位的方式可靠性得到了很大提升,可避免95%以上因為光源和角度問題帶來的定位誤差。
車輛進入廠區,在業務站登記裝酸信息(發卡),現場刷卡發起裝酸需求,系統自動下發裝酸量,鶴管自動尋口,插入后開始灌裝。自動控制裝酸閥門開啟,啟動裝酸泵,流量計計量到預裝量后自動關閉控制閥。裝酸泵為變頻控制,與現場裝酸口開啟數量連鎖,自動控制裝酸泵頻率,地下槽液位低聯鎖停止裝酸泵運行。裝酸泵出口設置回流管、自力式調壓閥。地下槽液位、進酸閥控制由DCS控制。
智能鶴管三維結構:
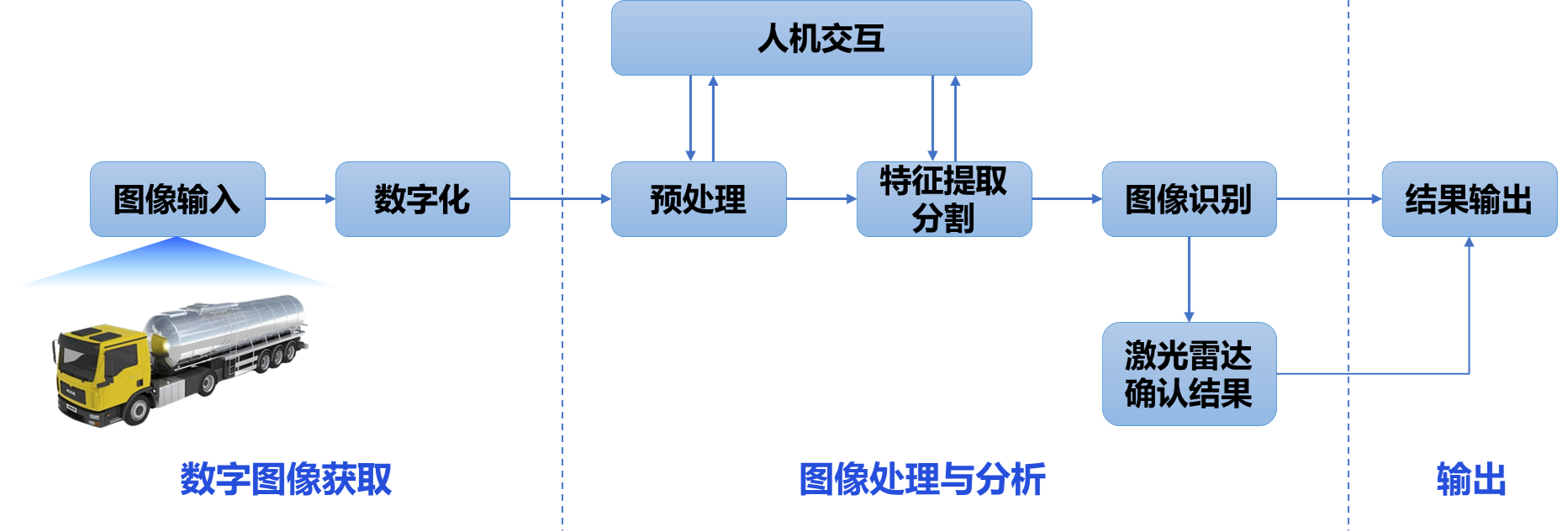
智能自動對位系統:
基于視覺系統的定位算法主要是通過采集罐口特征信息,經過軟件深度學習,根據罐口特征自動識別罐口區域。此種算法比之前使用的模板匹配的方式更加可靠,通過以圖找位的方式可靠性得到了很大提升,可避免95%以上因為光源和角度問題帶來的定位誤差。使用單目視覺和偏移坐標系作為輔助信息,利用三角法計算特征點在當前鶴管坐標系中的坐標位置,消除了使用絕對坐標系時的累積誤差,使得定位的結果更加精確。
視覺建立坐標系后,記錄罐口位置,并將位置信息發送給控制系統,通過伺服系統,進行運動控制,由編碼器、激光測量儀實時反饋鶴管當前位置,并與系統坐標系實時效驗,以保系統對鶴管行進位置實時控制。當鶴管行進到槽車罐口正上方,位置檢測傳感器向系統反饋當前位置與目標位置一致,鶴管放入罐口,自動對位完成。
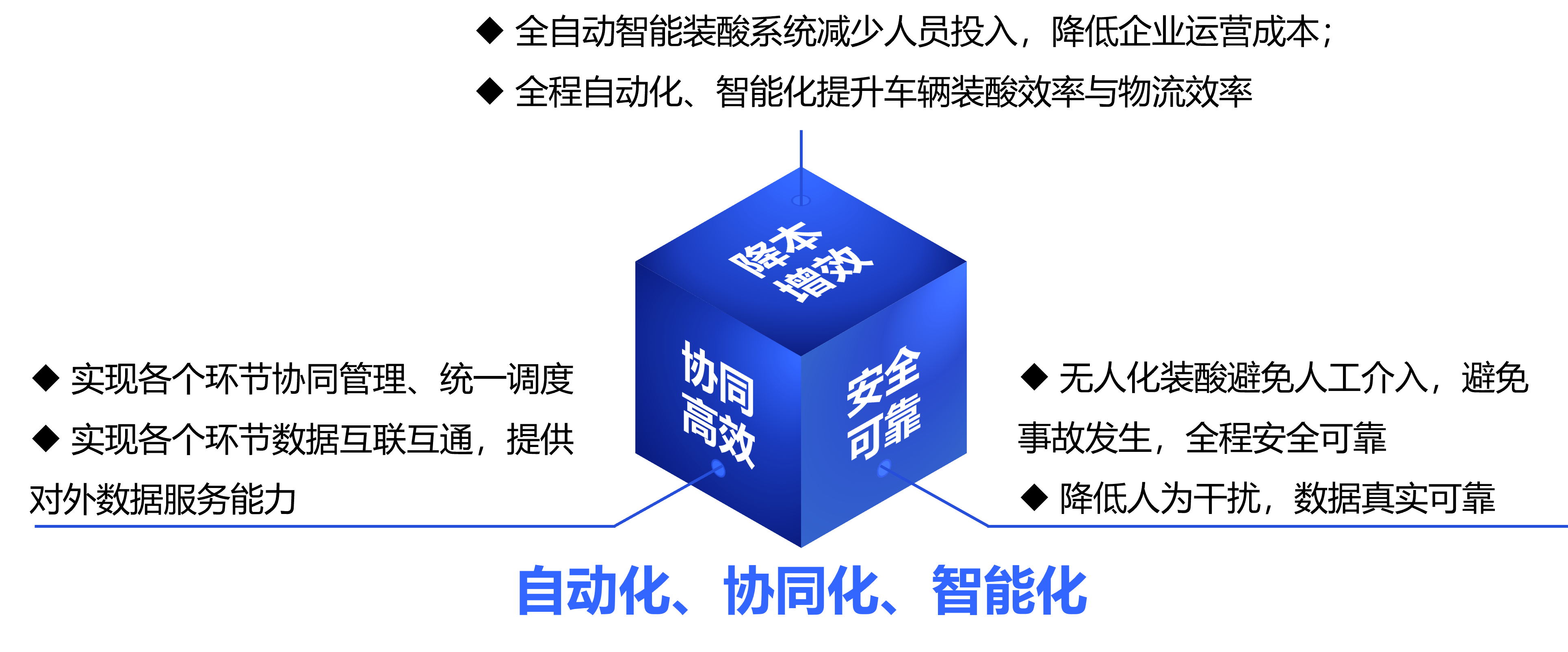
建設成效:
自動裝酸系統的整體建設為企業的數字化、智能化、協同化管理的提升提供很大的助力,幫助企業快速、高效、協同的進行裝酸過程的管控,為企業的安全生產、降本增效提供強有力的保障。
上一篇智能巡檢機器人解決方案


微信公眾號

微信在線咨詢
Copyright ? 2016 北京麥斯時代信息技術有限公司 版權所有 備案號:京ICP備08011755號-1 版權聲明 隱私保護 聯系我們